Drones
11 posts · all topics
-
Maker Faire Bay Area 2017
The Maker Faire Bay Area is this weekend, May 19-21, 2017, at the San Mateo Event Center. MakeHardware had a booth at the Maker Faire last year, but we have been too busy to run a booth for 2017. We do plan to attend for a day to check out what other folks have been busy making!…
-
How to Control Your Drone From a Computer
After reading my post about how I used my computer to fly a Cheerson CX-10 drone, several people have asked me if it is possible to control other drones in a similar way. It is in fact pretty straightforward, and in some cases you can re-use exactly the same hardware that I used…
-
Manual Exposure vs Auto Exposure for ELP 2 MP USB Camera
For our drone flying project, we have been using the ELP 2 Megapixel USB Camera. The auto exposure on this camera works in most situations, but we found that it does not always adjust to bright sunlight. In preparation for demonstrating our computer-controlled drone at the Maker…
-
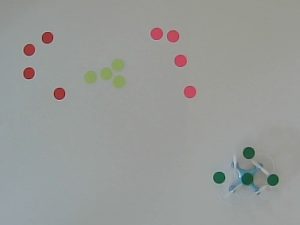
Blob Detection With Python and OpenCV
In my previous post, I described how to set up Python and OpenCV on your computer. Now I will show you how to use OpenCV’s computer vision capabilities to detect an object. OpenCV’s SimpleBlobDetector will be the primary function that we will be using. With the…
-
How to Set Up Your Python OpenCV Development Environment
For our drone flying project, we needed a way for our computer to detect the location of our mini-drone through the use of a webcam mounted above the flying area. We are not at all familiar with computer vision algorithms, but we do know how to call functions from a Python…
-
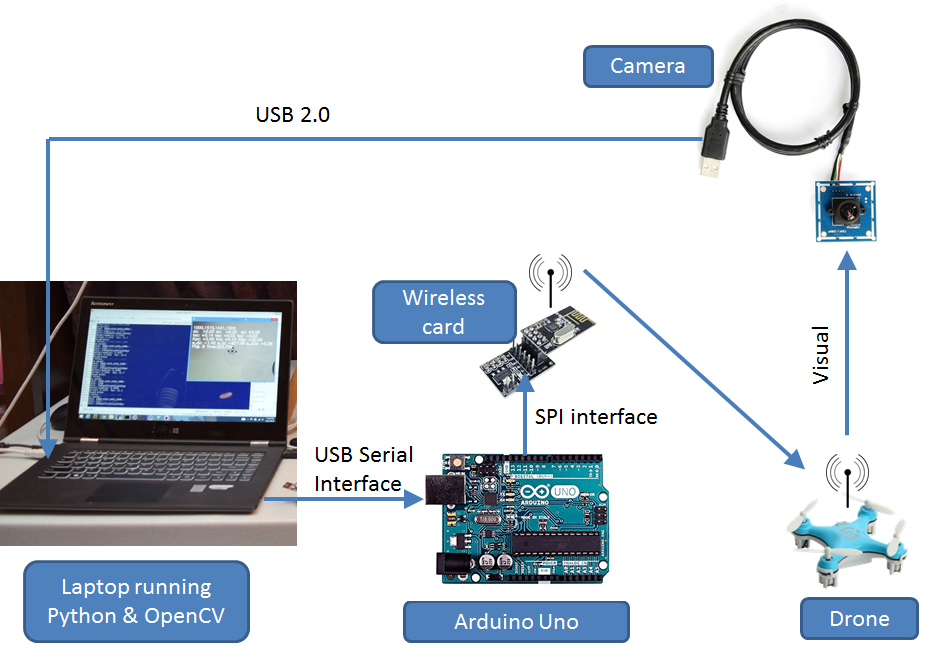
Teach your PC to fly a Mini-Drone!
A few months ago, I watched this TED talk where they setup an indoor arena and did some amazing things with drones. It got me thinking, and it inspired me to build something like that for myself – but on a much smaller and cheaper scale. In the video they use an expensive…
-
How to Get Your Boss to Buy You a Quadcopter
Every year my boss asks for suggestion for a teambuilding activity to have with his staff. Past activities have included thrilling activities like bocce ball and an indoor trampoline park (tip: this is a great idea if your team consists of 8 year-olds). This year I suggested…
-
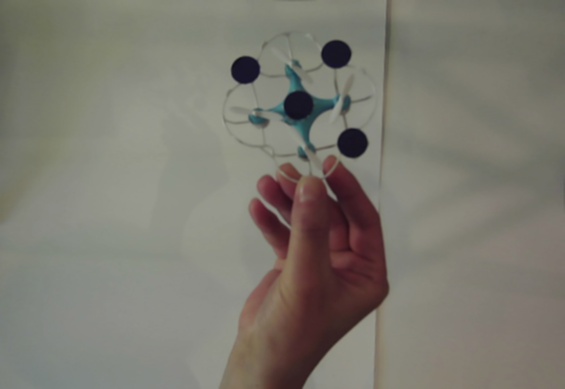
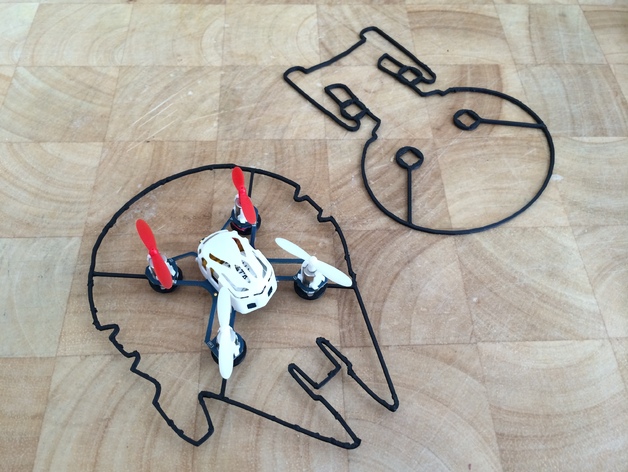
3D Printed Spaceship Blade Guards for the Cheerson CX-10
If you’ve got access to a 3D-printer, or are just looking for an excuse to use one, these little blade guards are a neat project. Making your quadcopter look like a spaceship seems to be quite the thing, here’s links to some examples.
-
Cheerson CX-10 Repair Guide and Tips
For all of you who received Cheerson CX-10 mini-quadcopters as holiday gifts and are learning to fly, bookmark this page because you’ll need it soon. Here’s a list of some common repairs – you might as well learn about it now. FYI – The Cheerson CX-10 is also sometimes sold as…
-
The Cheerson CX-10, CX-10A , CX-10C, CX-10D, CX-10WD, CX-10WF and Related Mini-Quadcopters
There are a few variations on the Cheerson CX-10, and it can be a little confusing as to what the differences are. Here is a quick guide. See below for more information on all of these. For those interested in hacking the CX-10, it looks like there has been at least 3 different…
-
Mods and Hacks for the Cheerson CX-10
This is a compilation of links describing various hacks on the Cheerson CX-10 mini drone. The first one is my own hack where I control a Cheerson CX-10 from a PC using a webcam. This is a how-to on converting a Cheerson into a FPV. Pretty amazing! 3. This post describes how to…